Prototyping profile: Inspection robot for the CMS' cavern
CERN operates the LHC (Large Hadron Collider) the largest particle accelerator ever built. Four main experiments were established on its circumference with the purpose of resolving major scientific enigmas. The general-purpose detector CMS (Compact Muon Solenoid) is one of these experiments.
As part of the summer student program, a student — besides their lectures program, workshops, and other scientific activities — is asked to work on a project in one of CERN facilities. Students worked on the inspection robot project in the EP-CMX-SCI department throughout August 2022. The final product is a prototype of reusable gadgets on a relatively low budget. The purpose was to initially study the problem of limited access to the radiation area of CMS cavern while beams are running and severe faults may occur. This study was intended to set the track on an appropriate solution.
Access to the CMS detector is restricted during beams operation due to the harmful levels of radiation produced. Maintenance, repairs, and upgrades, therefore, need to be performed in scheduled access stops, which can be months apart and often only days or hours long. In the case that an urgent intervention is needed, the LHC is stopped and data taking is suspended. Operational time is a key metric for CERN and unscheduled downtime should be avoided at all costs. This means that unplanned access is only made in critical cases and many important tasks can only be performed at the year-end technical stops (YETS) or long shutdowns (LS2, LS3). The tasks that are delayed until scheduled stops can include important diagnostic work for the detector and the cavern. This leaves only a short window of time to both investigate and rectify any problem which might have occurred during a run. Furthermore, some faults i.e., water or gas leaks can cause serious problems when intervention is postponed. Without the ability to visit the experimental cavern in person, it can be difficult to make a call on a situation’s severity.
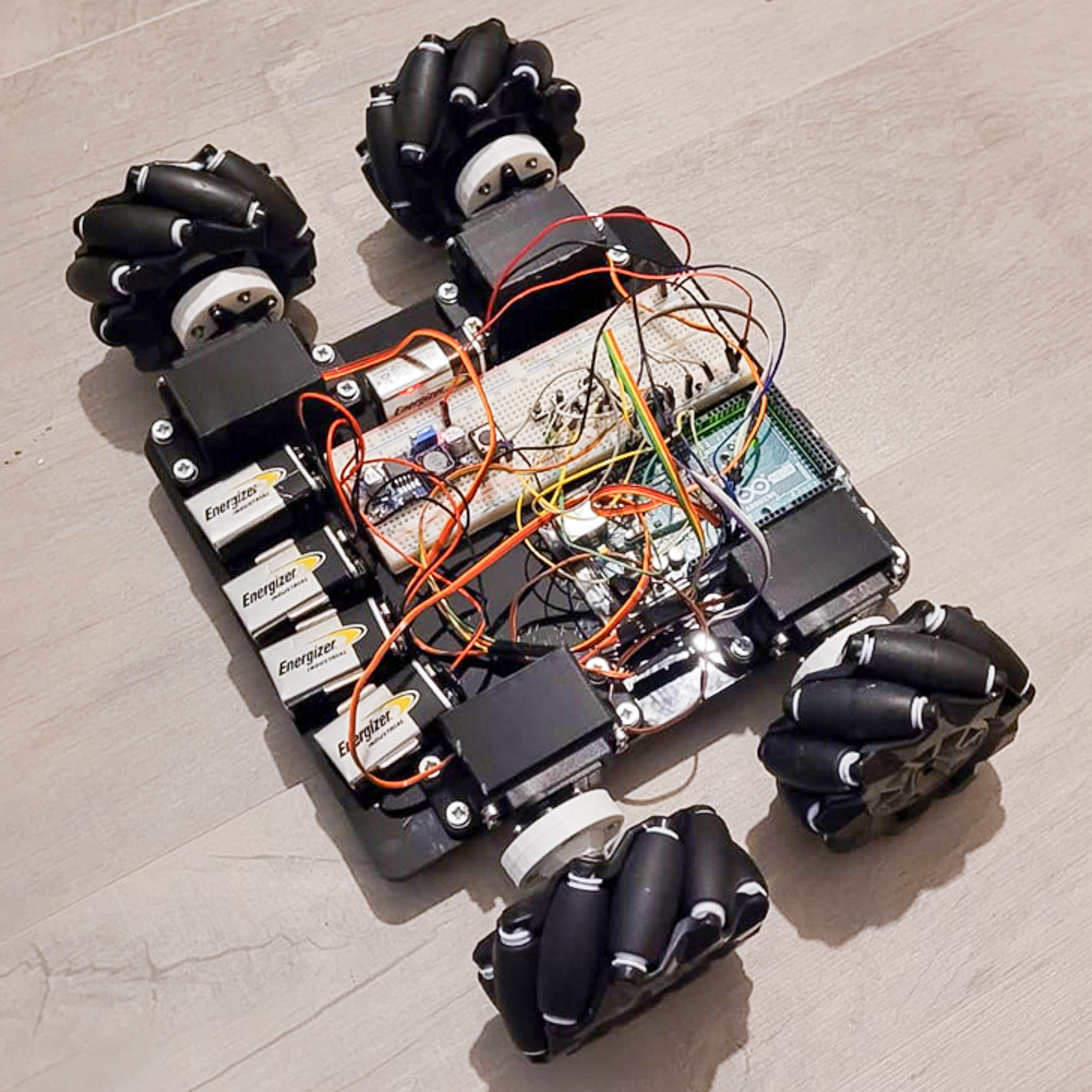
To overcome this problem, the CMS collaboration decided to design an inspection robot that can investigate faults during beam operation. This is the first try to make a prototype for this prospective vehicle.
Prototype by Mahmoud Abbas