Prototype profile: CLEAR-Robot (C-Robot)
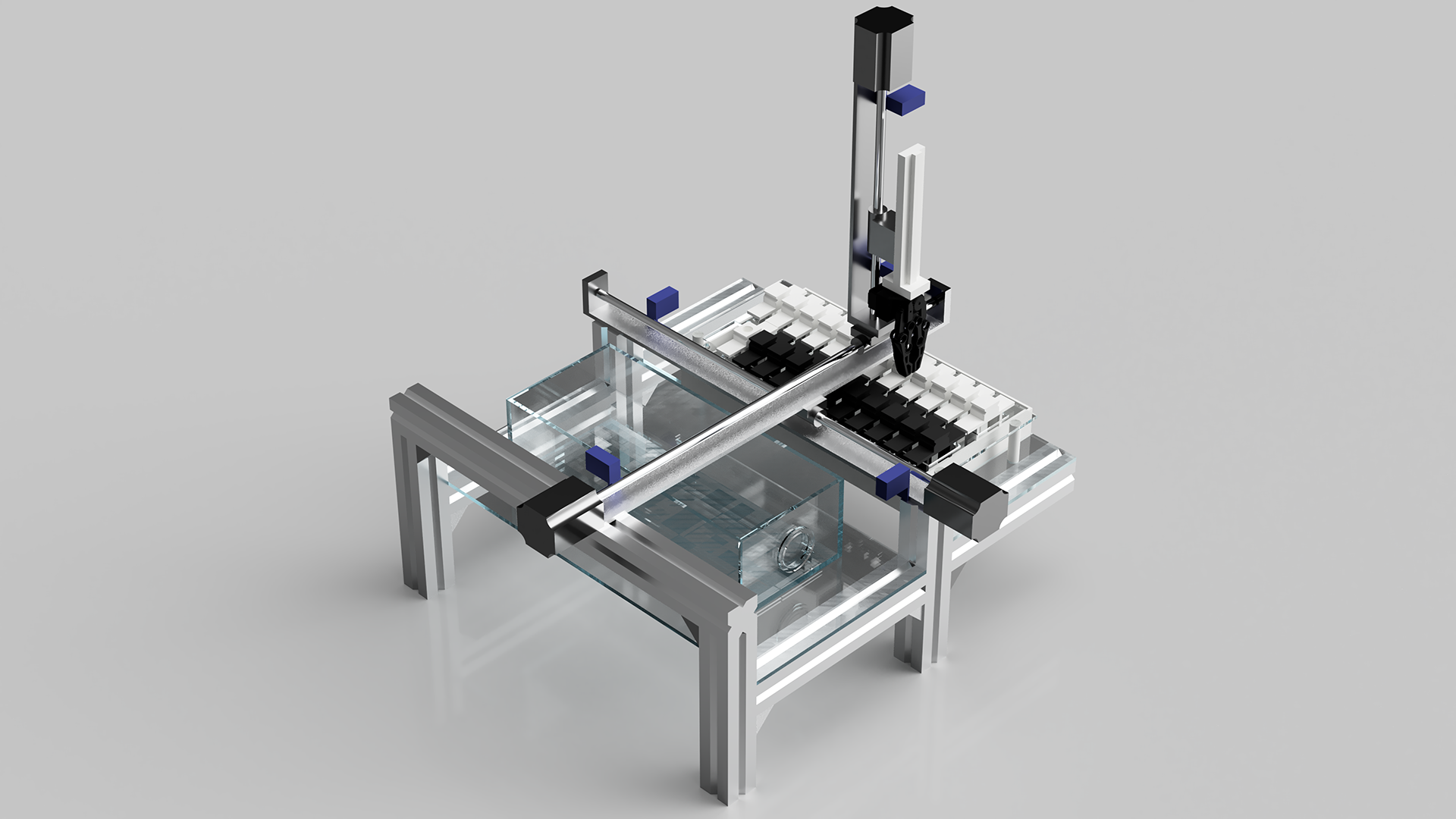
The C-Robot is a robotic system that was designed and built by 3 members of the CLEAR team (CERN Linear Electron Accelerator for Research). It was first designed to easily irradiate samples for medical applications. The robot is made of 3 linear stages for X,Y and Z axis, 6 limit switches (2 for each axis), a 3D printed grabber, a mounted-camera system with a moving filter and two tanks (one storage tank and one tank placed in the electron beam).
The C- Robot is fully remotely controlled from the CERN Technical Network thanks to Arduinos and to a Matlab graphical user interface. There are two separate areas on the C-Robot, the storage area and the beam area. In the storage area, a laser-cut PMMA plate and PMMA water tank are installed and can welcome 32 different 3D-printed holders. Each holder can be adapted for different experiments. Two dosimetric films can be installed on each holder, one before and one after the sample that needs to be irradiated. The transverse and longitudinal positions of the holder in the beam area can be chosen with a 50µm accuracy.
In order to measure the beam size and position where the samples will be irradiated, a dedicated holder with a YAG scintillating screen can be inserted in the beam area. The screen is angled by 45° compared to the electron beam and thanks to camera mounted on the C-Robot, the beam position and the beam size of the electron pulses can be measured directly at any transverse and longitudinal positions in the beam area.
The C-Robot also has two mounted thermometers in order to control the temperature of samples during an experiment. The C-Robot is fully open-source. Pictures, drawings, 3D renders and codes can be found on the C-Robot website and on the C-Robot Gitlab Repository.
The C-Robot was already used for 6 different experiments in collaboration with the University of Oxford, the University of Manchester, the University of Oslo, the University of Victoria and the Centre Hospitalier Universitaire Vaudois (CHUV).
Learn more about the C-Robot in our article.